1, the cause of image noise
In the process of generation and transmission of images, images are often degraded due to various noise interferences and effects, which will adversely affect the subsequent image processing and image visual effects. There are many types of noise, such as: electrical noise, mechanical noise, channel noise, and other noise. Therefore, in order to suppress noise, improve image quality, and facilitate higher-level processing, the image must be denoised and preprocessed.
2, the characteristics of image noise
Image noise blurs the image and even overwhelms image features, making it difficult to analyze.
Image noise generally has the following characteristics:
The distribution and size of noise in the image are irregular, ie random.
There is generally a correlation between noise and images. For example, the signal of the camera is related to the noise, the noise in the dark part is large, and the noise in the bright part is small. For another example, the quantization noise in the digital image is related to the image phase. When the image content is close to flat, the quantization noise exhibits a false contour. However, the random noise in the image may make the quantization noise less obvious due to the flutter noise effect.
Noise has superposition. In the tandem image transmission system, the noise of each part can be added if the noise of the same type is added, and the S/N ratio should be decreased.
3, the classification of image noise
3.1 Additive Noise and Multiplicative Noise
According to the relationship between noise and signal, image noise can be divided into additive noise and multiplicative noise. For ease of analysis and processing, multiplicative noise is often regarded as additive noise, and it is always assumed that signals and noise are independent of each other.
Assume that the signal is S(t) and the noise is n(t). If the mixed overlay waveform is in the form of S(t)+n(t), it is called additive noise. The additive hum and the signal strength of the image are not related, such as the noise of the scanned image of the “channel noise†television camera introduced during the transmission of the image.
If the superimposed waveform is in the form of S(t)[1+n(t)], it is called multiplicative noise. Multiplicative noise is related to signal strength, and often varies with the change of the image signal, such as the buzzing in the scanning image of the flying spot, the scanning raster of the television, and the film grain.
3.2 External noise and internal noise
According to the causes, image noise can be divided into external noise and internal noise. External noise refers to the noise caused by the external disturbance of the system, which is caused by electromagnetic waves or strings entering the system through the power supply. Such as electromagnetic interference generated by external electrical equipment, pulse interference generated by celestial discharge. The noise caused by the inside of the system electrical equipment is internal noise, such as mutual interference of internal circuits. Internal noise can generally be divided into the following four categories: (1) Noise caused by the basic properties of light and electricity. (2) Noise generated by mechanical movement of electrical appliances. (3) Noise caused by the material itself. (4) Noise caused by internal equipment circuit in the system.
3.3 Smooth Noise Non-stationary Noise
According to statistical characteristics, image noise can be divided into stationary noise and non-stationary noise. The noise whose statistical characteristics do not change over time is called stationary noise. The noise whose statistical characteristics change with time is called non-stationary noise.
3.4 Other types of noise
Quantum hum is the main source of noise for digital images, and its size shows the difference between the digital image and the original image. The best way to reduce this squeak is to use the gray level probability density function to optimize the optimization of the level.
"Salty and salty" noise: Such squeaks as white spots on black images caused by image cuts, black-spot noises on white images, errors introduced in the transform domain, and transformed noise caused by inverse transform of the image.
According to the shape of the noise amplitude distribution over time, if its amplitude distribution is Gaussian, it is called Gaussian noise, and according to Rayleigh distribution, it is called Rayleigh noise.
According to the shape of noise spectrum, if the spectrum is uniformly distributed, the noise is called white noise; the frequency spectrum is inversely proportional to the frequency is called 1/f noise; and the frequency is proportional to the square of the frequency is called triangular noise and so on.
According to noise sources that often affect image quality, electronic noise and optoelectronic noise can be divided.
Electronic noise: Electronic noise caused by random thermal motion of electrons in resistive devices is the simplest of the three models.
Optoelectronic noise: Optoelectronic noise is caused by the statistical nature of light and the photoelectric conversion process in an image sensor.
4, image noise model
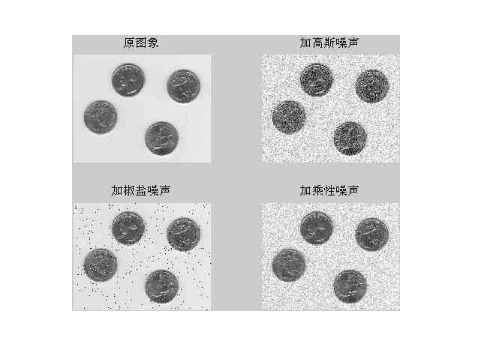
The noise contained in the actually obtained image can be classified differently according to different classifications. From the probability distribution of noise, it can be divided into Gaussian noise, Rayleigh noise, gamma noise, exponential noise and uniform noise.
4.1 Gaussian noise
Due to the mathematically tractable nature of Gaussian noise in space and frequency domains, this type of noise (also known as normal noise) model is often used in practice. In fact, this ease of handling makes the Gaussian model often used in critical situations.
The PDF of the Gaussian random variable z is given by:

Where z represents the gray value, μ represents the mean or expected value of z, and σ represents the standard deviation of z. The square of the standard deviation σ2 is called the variance of z. When z obeys the distribution of formula (1.3.1), 70% of its value falls within [(μ-σ), (μ+σ)], and 95% falls in [(μ-2σ), ( μ +2σ)] range.
4.2 Rayleigh noise
The probability density function of Rayleigh noise is given by:

The mean and variance of the probability density are given by:
4.3 Gamma (Ireland) noise
The PDF of gamma noise is given by:
Where a>0, b is a positive integer and "!" represents factorial. The mean and variance of the density are given by:

Although it is often used to express gamma density, strictly speaking, it is correct only when the denominator is a gamma function Г(b). When the denominator is expressed as an expression, the density is approximately called Irish density.
4.4 Exponential distribution noise
The PDF of exponential noise can be given by:
Where a>0. The expected value and variance of the probability density function are:

4.5 Uniform noise distribution
The probability density of the uniform noise distribution is given by:
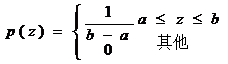
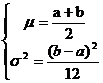
The expected value and variance of the probability density function can be given by:
4.6 Impulse noise (salt noise)
The (bipolar) impulse noise PDF can be given by:
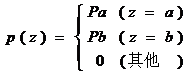
If b > a, the gray value b will be displayed as a bright spot in the image, whereas the value of a will be displayed as a dark spot. If Pa or Pb is zero, the impulse noise is called a unipolar pulse. If both Pa and Pb cannot be zero, especially if they are approximately equal, the impulse noise value will be similar to the pepper and salt powder particles randomly distributed on the image. For this reason, bipolar impulse noise is also called salt and pepper noise. At the same time, they are sometimes referred to as shot and spike noise.
The noise pulse can be positive or negative. Calibration is usually part of the digital process of the image. Because the impulse interference is usually large compared to the intensity of the image signal, the impulse noise is always digitized to a maximum value (pure black or pure white) in an image. In this way, it is usually assumed that a, b are saturation values. In a sense, in the digitized image, they are equal to the allowed maximum value and minimum value. Due to this result, negative pulses appear in the image as a black dot (pepper). For the same reason, positive pulses appear in the image as white dots (salt points). For an 8-bit image, this means a=0 (black). b=255 (white).
5, the introduction of common image denoising algorithms
The importance of image noise in digital image processing technology has become more and more obvious, such as the interpretation of high-magnification aerial film, noise removal in X-ray image systems, etc. have become indispensable technical steps. Image denoising algorithms can be divided into the following categories:
(1) Spatial domain filtering
Spatial filtering is to perform data operations directly on the original image to process the gray values ​​of the pixels. Common spatial domain image denoising algorithms include neighborhood averaging, median filtering, and low-pass filtering.
(2) Transform domain filtering
Image transform domain denoising is a kind of transformation of the image, transforming the image from the spatial domain to the transform domain, and then processing the transform coefficients in the transform domain, and then performing inverse transform to convert the image from the transform domain to the spatial domain to achieve Remove the purpose of image snoring. There are many methods for transforming an image from a spatial domain to a transform domain, such as Fourier transform, Walsh-Hadamard transform, cosine transform, KL transform, and wavelet transform. The Fourier transform and wavelet transform are common transform methods for image denoising.
(3) Partial differential equations
Partial differential equation is an image processing method that has emerged in recent years. It mainly deals with low-level image processing and has achieved good results. Partial differential equations have anisotropic characteristics and are used in image denoising to remove noise while maintaining edges well. The main application of partial differential equations is a basic iterative format. By updating over time, the image is gradually approaching the desired effect, and its subsequent work is improved. This method has a large selection space when determining the diffusion coefficient, and has the function of backward diffusion at the same time as the forward diffusion. Therefore, it has the ability to smooth the image and sharpen the edge [5]. Partial differential equations have achieved good results in image processing with low noise density, but the denoising effect is not good when dealing with high-noise density images, and the processing time is significantly higher.
(4) Variational method
Another image denoising method using mathematics is based on the idea of ​​variational method. The energy function of the image is determined. By minimizing the energy function, the image is smoothed. The widely used full variational TV model is now this kind. The key to this kind of method is to find the right energy equation, guarantee the stability of the evolution, and obtain the ideal result.
(5) Morphological noise filter
Combining open and closed can be used to filter out noise. First, open the noise image, select the structural element matrix is ​​larger than the noise size, so the result of the open operation is to remove the background noise; then the image obtained in the previous step is closed The operation removes the noise from the image. Based on this, it can be seen that the image type to which this method is applicable is that the size of the objects in the image is relatively large, and there is no minute detail, and the noise removal effect for such images will be better.
Heated Mouse Mat,Heated Computer Mouse Mat,Usb Heated Mouse Mat,Heated Mouse Pad Warmer
Ningbo Sinco Industrial & Trading Co., Ltd. , https://www.newsinco.com